در این نوع از معماری توربین های بادی که به صورت افقی بین طبقات نصب می شود بهره می برند که علاوه بر تامیین برق کل ساختمان ، برق مورد نیاز چندین ساختمان در مقیاس خودش را نیز فراهم می کند .
یک برج 59 طبقه در دبی ، 48 توربین بادی دارد که ساختمان را تبدیل به یک منبع تولید انرژی سبز در شهر می کند و، بستر بهتری را برای زندگی هر چه بهتر آبندگان فراهم کنیم .

ساختمان طراحی شده در دبی :
در این ساختمان 48 توربین بادی در بین طبقات نصب شده و همچنین در پشت بام از صفحات خورشیدی استفاده شده است که باد و نور خورشید را بدون هیچ گونه آلودگی به انرژی الکتریکی تبدیل می کند .
با توجه به میانگین سرعت سالانه باد در دبی که 16 کیلومتر در ساعت است ، برای تامین برق ساختمان 8 توربین نیاز است . 40 توربین دیگر نیز می تواند تامین کننده ی انرژی 5 ساختمان مشابه دیگر باشد .

توربین ها طوری در طبقات قرار دارند که تقریبا و عملا نا محسوس هستند . این توربین ها نه نیاز به پایه دارند و نه نیاز به فونداسیون بتنی ، به علاوه در فاصله کمی از مصرف کننده قرار دارند که باعث می شود افت فشار نداشته باشیم . طرح و شکل ساختمان و همچنین استفاده از فیبرهای مخصوص کربنی که در ساخت یونیت ها بکار رفته است مانع از انعکاس صدا می شود ، بنابراین پروسه تامین برق با توربین بادی آلودگی صوتی به همراه ندارد . همچنین تولید این مقدار انرژی بدون آنکه در مسائل زیبا شناختی و طراحی ساختمان تاثیر بگذارد به نوبه خود پیشرفت چشمگیری در بهره گیری از منابع انرژی می باشد .
این برج در 2 فاز اصلی اجرا خواهد شد . هسته ی بتنی در عرض 6 ماه تکمیل می شود ، سپس یونیت ها به هسته بتنی متصل می شوند ، تقریبا هر طبقه در یک هفته نصب می شود و 30% در زمان ساخت این برج در مقایسه با برج های دیگر صرفه جویی می شود . همچنین جنس یونیت ها از فولاد ، آلومینیوم و فیبرهای کربنی ساخته می شود .


خدایا من در کلبه حقیرانه خود کسی را دارم که تو در عرش کبریایی خود نداری
من خدایی چون تو دارم و تو چون خود نداری زین العابدین(ع)
@@ @@ @@ @@ @@ @@ @@ @@ @@ @@ @@ @@ @@
بزرگترین گناه = ترس @ بزرگترین سرمایه = اعتماد بنفس @
بزرگترین تفریح = کار @ بزرگترین هدیه = گذشت @
بزرگترین افتخار = ایمان @ بزرگترین اسرار = مرگ @
بزرگترین بلا = نومیدی @ @
بزرگترین شجاعت = صبر @ (( علی علیه السلام )) @
بزرگترین استاد = تجربه @ @

| ||||
| ||||
|
| ||||
  |
تمام زمانها بر حسب GMT + 3.5 Hours میباشند | |
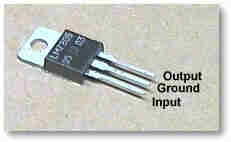
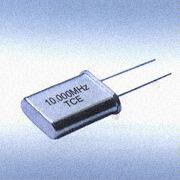
در این بخش با مدار یک کنترل از راه دور تک کانال آشنا
در بین کسانی که برای دعای باران رفته اند افرادی
که با خود چتر برده اند به خدا ایمان کامل دارند
بکوشید آنچه را که دوست دارید به دست آورید
وگرنه ناچارید آنچه را که بدست آورده اید دوست بدارید
(شکسپیر)
تا به خودتان ایمان نیاورید دیگران به شما ایمان نمی آورند
(@@@)
سـرّ عشق (سعدی)
هزار جهد بکردم که سـرّ عشق بپوشم نبود بر سر آتش میسرم که نجوشم
به هوش بودم از اول که دل به کس نسپارم شمایل تو بدیدم نه صبر ماند ونه هوشم
من رمیده دل آن به که در سماع نیایم که گربه پای درآیم به در برند به دوشم
مرا به هیچ بدادی و من هـنوز بر آنم که از وجود تو مویی به عالمی نفروشم
مرا مگوی که سعدی طریق عشق رها کن سخن چه فایده گفتن که پند می ننیوشم
به راه بادیه رفـتن به از نشستن باطل و گر مراد نیابم به قــــدر وسع بکوشم
سـلسـله موی دوست
سـلسـله مـوی دوسـت حلـقـه دام بـلاسـت هر که دراین حلقه نیست فارغ از این ما جراست
گر بزنـنـدم به تـیغ در نـظرش بی دریغ دیدن او یک نظر صد چو منـش خون بهاســت
گر برود جــان ما درطـلب وصل دوسـت حیف نبا شد که دوست دوست تر از جان ماست
مـالـک مـلـک وجــود حــا کم رد و قـبول هر چه کنـد جور نـیسـت ور تو بگویی جفاست
سعدی از اخلاق دوست هر چه برآید نکوست گــو هـمه دشنام گــو کز لب شیرین دعاســت
تقدیمی ازبرگ زرد به گل نرگس:
همه هست آرزویم که ببینم از تو رویی چه زیان تو را که من هم برسم به آرزویی
به کسی جمال خود را ننموده ای و بینم همه جا به هر زبانی بود از تو گفت وگویی
به ره تو بس که نالم زغـم تو بس که مویم شده ام ز ناله نالی شده ام ز مویه مویی
همه خوش دل اینکه مطرب بزند به تار چنگی من از آن خوشم که چنگی بزنم به تار مویی
بشکست اگر دل من به فـدای چشم مـسـتت سر خــمّ می سلامت شکـند اگــر سـبویی
همه مـوسـم تــفـرّج به چمن روند وصحرا تو قـدم به چـشم مـن نه بنـشین کنار جویی
نه بـه باغ ره دهــندم که گـلی به کام بویم نه دماغ ایـنکه از گـل شنوم به کام بویی
( فصیح الزمان شیرازی)